INFRARROJO
El infrarrojo es un tipo de luz que no podemos ver con nuestros ojos. Nuestros ojos pueden solamente ver lo que llamamos luz visible. La luz infrarroja nos brinda información especial que no podemos obtener de la luz visible. Nos muestra cuánto calor tiene alguna cosa y nos da información sobre la temperatura de un objeto. Todas las cosas tienen algo de calor e irradian luz infrarroja. Incluso las cosas que nosotros pensamos que son muy frías, como un cubo de hielo, irradian algo de calor. Los objetos fríos irradian menos calor que los objetos calientes. Entre más caliente sea algo más es el calor irradiado y entre más frío es algo menos es el calor irradiado. Los objetos calientes brillan más luminosamente en el infrarrojo porque irradian más calor y más luz infrarroja. Los objetos fríos irradian menos calor y luz infrarroja, apareciendo menos brillantes en el infrarrojo. Cualquier cosa que tenga una temperatura irradia calor o luz infrarroja. En las imágenes infrarrojas mostradas abajo, colores diferentes son usados para representar diferentes temperaturas. Puedes encontrar cuál temperatura es representada por un color usando la escala color-temperatura a la derecha de las imágenes. Las temperaturas están en grados Fahrenheit.taza de metal conteniendo una bebida muy caliente. Observa los anillos de color demostrando el calor proveniente del líquido a través de la taza de metal. Puedes observar esto también en la cuchara de metal. A la derecha está una imagen infrarroja de un cubo de hielo derritiéndose. Observa los anillos de color mostrando cómo el agua ya derretida se calienta mientras se desplaza alejándose del cubo. A pesar de que el cubo de hielo es frío, aún irradia calor, como tú puedes ver relacionando el color del cubo de hielo con su temperatura.Una fotografía a la luz visible (izquierda) y una fotografía infrarroja (derecha) de dos vasos. Un vaso contiene agua fría mientras que el otro contiene agua caliente. En la fotografía a la luz visible no podemos decir solamente mirando cuál vaso contiene agua fría y cuál agua caliente. En la imagen infrarroja podemos claramente "observar" la brillantez del agua caliente en el vaso de la izquierda y el agua más oscura y fría en el vaso de la derecha. Si nosotros tuviéramos ojos infrarrojos, podríamos decir si un objeto es caliente o fríos sin tener que tocarlo.
MICROONDAS (radiación)
Con el término microondas se identifica a las ondas electromagnéticas en el espectro de frecuencias comprendido entre 300 MHz y 300 GHz. El periodo de una seńal de microondas está en el rango de 3 ns a 3 ps, y la correspondiente longitud de onda en el rango de 1 m a 1 mm. Algunos autores proponen que el espectro electromagnético que comprenden es de 1 GHz a 30 GHz, es decir, a longitudes de onda entre 30 cm a 1 cm. A las seńales con longitud de onda en el orden de los milímetros se les llama ondas milimétricas.
Las microondas tienen longitudes de onda aproximadamente en el rango entre 30 cm( frecuencia=1 GHz) a 1 mm(300 GHz).La existencia de ondas electromagnéticas, de las cuales las microondas forman parte del espectro de alta frecuencia, fueron predichas por James Clerk Maxwell en 1864 de sus famosas ecuaciones.
En 1888, Heinrich Rudolf Hertz fue el primero en demostrar la existencia de ondas electromagnéticas mediante la construcción de un aparato para producir ondas de radio.
El rango de las microondas incluye las bandas de radiofrecuencia de UHF (ultra-high frequency, frecuencia ultra alta en espańol) (0.3-3 GHz), SHF (super-high frequency, super alta frecuencia) (3-30 GHz) y EHF (extremely high frequency, extremadamente alta frecuencia) (30-300 GHz).
Generación
Las microondas pueden ser generadas de varias maneras, generalmente divididas en dos categorías: dispositivos de estado sólido y dispositivos basados en tubos de vacío. Los dispositivos de estado sólido para microondas están basados en semiconductores de silicio o arsenuro de galio, e incluyen transistores de efecto campo (FET), transistores de unión bipolar (BJT), diodos Gunn y diodos IMPATT. Se han desarrollado versiones especializadas de transistores estándar para altas velocidades que se usan comúnmente en aplicaciones de microondas. Los dispositivos basados en tubos de vacío operan teniendo en cuenta el movimiento balístico de un electrón en el vacío bajo la influencia de campos eléctricos o magnéticos, entre los que se incluyen el magnetrón, el klystron, el TWT y el girotón.
Usos
Un horno microondas usa un magnetrón para producir microondas a una frecuencia de aproximadamente 2.45 GHz para cocción. Las microondas hacen vibrar o rotar las moléculas de agua, esta vibración crea calor, el cual calienta los alimentos. Debido a que la materia está hecha esencialmente de agua, los alimentos son fácilmente cocinados de esta manera.
Las microondas son usadas en radiodifusión, ya que estas pasan fácilmente a través de la atmósfera con menos interferencia que otras longitudes de onda mayores. También hay más ancho de banda en el espectro de microondas que en el resto del espectro de radio. Típicamente, las microondas son usadas para transmisión en noticieros televisivos para transmitir una seńal desde una localización remota a una estación de televisión desde una camioneta especialmente equipada .
El radar también incluye radiación de microondas para detectar el rango, la velocidad y otras características de objetos remotos.
Protocolos inalámbricos LAN, tales como Bluetooth y las especificaciones IEEE 802.11g y b también usan microondas en la banda ISM, aunque la especificación 802.11a usa una banda ISM en el rango de los 5 GHz.
La televisión por cable y el acceso a Internet vía cable coaxial usan algunas de las más bajas frecuencias de microondas. Algunas redes de telefonía celular también usan bajas frecuencias de microondas.
Un máser es un dispositivo similar a un láser pero que trabaja con frecuencias de microondas.
Bandas de frecuencia de microondas
El espectro de microondas es usualmente definido como energía electromagnética en el rango entre 1 GHz y 1000 GHz. Las aplicaciones más comunes de las microondas están en el rango de 1 y 40 GHz.
Bandas de frecuencia de microondas
Designación Rango de frecuencias
Banda L 1 a 2 GHz
Banda S 2 a 4 GHz
Banda C 4 a 8 GHz
Banda X 8 a 12 GHz
Ku band 12 a 18 GHz
BandaK 18 a 26 GHz
Ka band 26 a 40 GHz
Banda Q 30 a 50 GHz
BandaU 40 a 60 GHz
Banda V 50 a 75 GHz
Banda E 60 a 90 GHz
Banda W 75 a 110 GHz
Banda F 90 a 140 GHz
Banda D 110 a 170 GHz
SATELITES
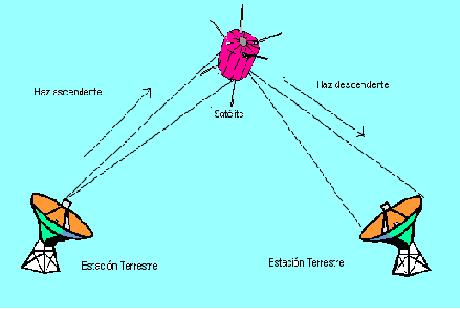
Un haz de microondas, el cual es modulado por los datos, se transmite al satélite desde la superficie terrestre.Este haz es recibido por el transponder del satélite el cual lo retransmite a la estación destino.Cada satélite tiene muchos transponders. Cada transponder cubre una banda de frecuencia determinada. Un satélite tiene un ancho de banda elevado (500 MHz). Utiliza la técnica de multiplexaje para enviar centenas de datos con una alta velocidad.Los satélites son geoestacionarios El haz de la seńal emitida por el satélite puede ser: Ancho para que pueda ser captado en un área extensa Fino para que solo pueda captarse en un área limitada. Con el haz fino la potencia es más elevada por lo que se pueden usar antenas parabólicas de diámetro mas pequeńo (VSAT, very small aperture terminals) En una forma típica, la comunicación es dúplex y la frecuencia de ascenso y descenso a cada estación terrena es diferente. En la forma VSAT existe una estación central que se comunica con varias estaciones terrestres de VSAT distribuidas por todo el país. Un computador conectado a cada VSAT puede comunicarse el computador conectado a la estación central. La estación central, comúnmente transmite a todas las estaciones VSAT en la misma frecuencia. Cada estación VSAT transmite en la dirección opuesta en una frecuencia distinta.
CODIGO HAMMING
En informática, el código de Hamming es un código detector y corrector de errores que lleva el nombre de su inventor, Richard Hamming. En los datos codificados en Hamming se pueden detectar errores en uno o en dos bits, y también corregir errores en un solo bit. Esto representa una mejora respecto a los códigos con bit de paridad, que pueden detectar errores en sólo un bit, pero no pueden corregirlo
Códigos Hamming
Si se ańaden junto al mensaje más bits detectores-correctores de error y si esos bits se pueden ordenar de modo que diferentes bits de error producen diferentes resultados, entonces los bits erróneos podrían ser identificados. En un conjunto de siete bits, hay sólo siete posibles errores de bit, por lo que con tres bits de control de error se podría especificar además de que ocurrió un error, qué bit fue el que lo causó.
Hamming estudió los esquemas de codificación existentes, incluido el de dos entre cinco, y generalizó sus conclusiones. Para empezar, desarrolló una nomenclatura para describir el sistema, incluyendo el número de los bits de datos y el de los bits detectores-correctores de error en un bloque. Por ejemplo, la paridad incluye un solo bit para cualquier palabra de datos, así que las palabras del Código ASCII que son de siete bits, Hamming las describía como un código (8.7), esto es, un total de 8 bits de los cuales 7 son datos. En el ejemplo anterior de la repetición, sería un código (3.1), siguiendo la misma lógica. La relación de la información es el segundo número dividido por el primero, por nuestro ejemplo de la repetición, 1/3.
Hamming también estudió los problemas que surgían al cambiar dos o más bits a la vez y describió esto como "distancia" (ahora llamada distancia de Hamming en su honor). La paridad tiene una distancia de 2, dado que cualquier error en dos bits no será detectado. La repetición (3.1)tiene una distancia de 3, pues son necesarios el cambio simultáneo de tres bits para obtener otra palabra de código. La repetición (4.1) (cada bit se repite cuatro veces) tiene una distancia de 4, así que el cambio de dos bits en el mismo grupo quedará sin definir.
Hamming estaba interesado en solucionar simultáneamente dos problemas: aumentar la distancia tanto como sea posible, a la vez que se aumentan al máximo los bits de información. Durante los ańos 40 desarrolló varios esquemas de codificación que mejoraban notablemente los códigos existentes. La clave de todos sus sistemas era intercalar entre los bits de datos los de paridad.
Hamming (7,4)
Hoy, el código de Hamming se refiere al (7.4) que Hamming introdujo en 1950. El código de Hamming agrega tres bits adicionales de comprobación por cada cuatro bits de datos del mensaje.
El algoritmo de Hamming (7.4) puede corregir cualquier error de un solo bit, y detecta todos los errores de dos bits.
Para un ambiente en el que el ruido pueda cambiar como máximo 2 bits de 7, el código Hamming (7.4) es generalmente el de pérdida mínima.
El medio tendría que ser muy ruidoso para que se perdieran más de 2 bits de cada 7 (casi el 45% de los bits transmitidos), y habría que considerar seriamente cambiar a un medio de transmisión más fiable.
El algoritmo es simple:
1. Todos los bits cuya posición es potencia de dos se utilizan como bits de paridad (posiciones 1, 2, 4, 8, 16, 32, 64, etc.).
2. Los bits del resto de posiciones son utilizados como bits de datos (posiciones 3, 5, 6, 7, 9, 10, 11, 12, 13, 14, 15, 17, etc.).
3. Cada bit de paridad se obtiene calculando la paridad de alguno de los bits de datos. La posición del bit de paridad determina la secuencia de los bits que alternativamente comprueba y salta, a partir de éste, tal y como se explica a continuación.
· Posición 1: comprueba 1, salta 1, comprueba 1, etc.
· Posición 2: comprueba 1, salta 2, comprueba 2, salta 2, comprueba 2, etc.
· Posición 4: comprueba 3, salta 4, comprueba 4, salta 4, comprueba 4, etc.
· Posición 8: comprueba 7, salta 8, comprueba 8, salta 8, comprueba 8, etc.
· Posición 16: comprueba 15, salta 16, comprueba 16, salta 16, comprueba 16, etc.
· Y así sucesivamente.
En otras palabras, el bit de paridad de la posición 2^k comprueba los bits en las posiciones que tengan al bit k en su representación binaria. Dicho a la inversa, el bit 13, por ejemplo, es chequeado por los bits 8, 4 y 1, al ser estos los de su representación binaria: 13=1101(2); 8=1000(2); 4=0100(2); 1=0001(2).
Así pues en la Posición 1, comprobaríamos los bits: 3, 5, 7, 9, 11...; en la Posición 2, los bits: 3, 6, 7, 10, 11, 14, 15...-; en la Posición 4 tendríamos: 5, 6, 7, 12, 13, 14, 15... Así hasta completar la nueva cadena.
Ejemplo
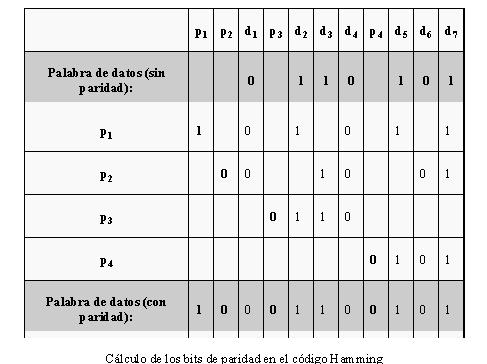
Consideremos la palabra de datos de 7 bits "0110101". Para ver cómo se generan y utilizan los códigos Hamming para detectar un error, observe las tablas siguientes. Se utiliza la d para indicar los bits de datos y la p para los de paridad.
En primer lugar los bits de datos se insertan en las posiciones apropiadas y los bits de paridad calculados en cada caso usando la paridad par.
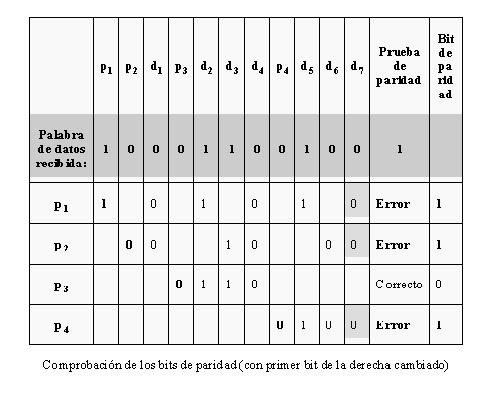
La nueva palabra de datos (con los bits de paridad) es ahora "10001100101". Consideremos ahora que el bit de la derecha, por error, cambia de 1 a 0. La nueva palabra de datos será ahora "10001100100"; cuando se analice el modo en que se obtienen los bits de paridad en los códigos de Hamming se observarán variaciones en la paridad, lo que significará que hay error.
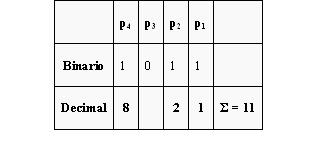
El paso final es evaluar los bits de paridad (recuerde que el fallo se encuentra en d7). El valor entero que representan los bits de paridad es 11, lo que significa que el bit décimo primero de la palabra de datos (bits de paridad incluidos) es el erróneo y necesita ser cambiado.
Cambiando el bit décimo primero 10001100100 se obtiene de nuevo 10001100101. Eliminando los bits de paridad de Hamming se vuelve a obtener la palabra de datos original 0110101.
Observe que en la comprobación de la paridad no se tienen en cuenta los bits de paridad. Si el error se produjera en uno de ellos, en la comprobación sólo se detectaría un error, justo el correspondiente al bit de paridad causante del mismo.
Finalmente, cuando cambien dos bits, en la comprobación de paridad se obtendrá un valor decimal superior a 11, detectándose el error; sin embargo no se podrá saber las posiciones de los dos bits que cambiaron
CRC
Los códigos cíclicos también se llaman CRC (Códigos de Redundancia Cíclica) o códigos polinómicos. Su uso está muy extendido porque pueden implementarse en hardware con mucha facilidad y son muy potentes.
Estos códigos se basan en el uso de un polinomio generador G(X) de grado r, y en el principio de que n bits de datos binarios se pueden considerar como los coeficientes de un polinomio de orden n-1.
Por ejemplo, los datos 10111 pueden tratarse como el polinomio x4 + x2 + x1 + x0
A estos bits de datos se le ańaden r bits de redundancia de forma que el polinomio resultante sea divisible por el polinomio generador. El receptor verificará si el polinomio recibido es divisible por G(X). Si no lo es, habrá un error en la transmisión.
Los bits de datos se dividen en bloques (llamados frames en inglés), y a cada bloque se le calcula r, que se denomina secuencia de comprobación de bloque (Frame Check Sequence, FCS, en inglés)
Los polinomios generadores más usados son:
CRC-12: x12 + x11 + x3 + x2 + x1 + 1. Usado para transmitir flujos de 6 bits, junto a otros 12 de redundancia. Es decir, usa bloques de 6 bits, a los que les une un FCS que genera de 12 bits.
CRC-16: x16 + x15 + x2 + 1. Para flujos de 8 bits, con 16 de redundancia. Usado en Estados Unidos, principalmente.
CRC-CCITT: x16 + x12 + x5 + 1. Para flujos de 8 bits, con 16 de redundancia. Usado en Europa, principalmente.
CRC-32: x32 + x26 + x23 + x22 + x16 + x12 + x11 + x10 + x8 + x7 + x5 + x4 + x2 + x + 1. Da una protección extra sobre la que dan los CRC de 16 bits, que suelen dar la suficiente. Se emplea por el comité de estándares de redes locales (IEEE 802) y en algunas aplicaciones del Departamento de Defensa de Estados Unidos.
Si tenemos un polinomio generador tal que G(x)=x2+1 podremos obtener a partir de él que el CRC es capaz de detectar todos los errores impares, genera una redundancia de 2 bits y no será capaz de detectar todos los errores dobles, por ejemplo una secuencia error-válido pasaría siempre inadvertida
El algoritmo utilizado por el control de redundancia cíclica es el siguiente:
Se ańaden r bits "0" a la derecha del mensaje (esto es, se ańaden tantos ceros como grado tenga el polinomio generador).
Se divide el polinomio obtenido por el polinomio generador. La división se realiza en módulo 2, que es igual que la división binaria, con dos excepciones:
1 + 1 = 0 (no hay acarreo) y 0 - 1 = 1 (no hay acarreo)
Y se ańade el resto de la división al polinomio original
La elección del polinomio generador es esencial si queremos detectar la mayoría de los errores que ocurran.
Uno de los polinomios generadores que más se suelen utilizar es el estándar CCITT:
x16 + x12 + x5 + 1.
Este polinomio permite la detección de:
· 100% de errores simples.
· 100% de errores dobles.
· 100% de errores de un número impar de bits.
· 100% de errores en ráfagas (en una serie sucesiva de bits) de 16 o menos bits.
· 99.99% de errores en ráfagas de 18 o más bits.
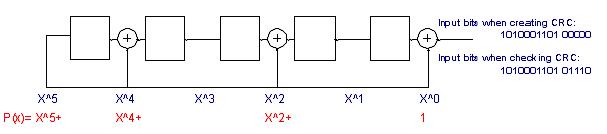
Implementing the CRC algorithm in hardware
The hardware CRC implementation is shown in the next figure. The Implementation shown is for a specific set of parameters:
Message M=1010001101
Pattern P=110101
FCS F=1110 (to be calculated)
The circuit is implemented as follows:
1. The register contains n bits, equal to the length of the FCS
2. There are up to n XOR gates
3. The presence or absence of a gate corresponds to the presence or absence of a term in the divisor polynomial P(X)
The same circuit is used for both creation and check of the CRC. When creating the FCS, the circuit accepts the bits of the raw frame and then a sequence of zeros. The length of the sequence is the same as the length of the FCS. The contents of the shift register will be the FCS to append. When checking the FCS, the circuit accepts the bits of the received frame (raw frame appended by FCS and perhaps corrupted by errors). The contents of the shift register should be zero or else there are errors.
MODULACION (telecomunicación)
En telecomunicación el término modulación engloba el conjunto de técnicas para transportar información sobre una onda portadora, típicamente una onda senoidal. Estas técnicas permiten un mejor aprovechamiento del canal de comunicación lo que posibilita transmitir más información en forma simultánea, protegiéndola de posibles interferencias y ruidos.
Básicamente, la modulación consiste en hacer que un parámetro de la onda portadora cambie de valor de acuerdo con las variaciones de la seńal moduladora, que es la información que queremos transmitir.
Dependiendo del parámetro sobre el que se actúe, tenemos los distintos tipos de modulación:
· Modulación en doble banda lateral (DSB)
· Modulación de amplitud (AM)
· Modulación de fase (PM)
· Modulación de frecuencia (FM)
· Modulación banda lateral única (SSB)
· Modulación de banda lateral vestigial (VSB, ó VSB-AM)
· Modulación de amplitud en cuadratura (QAM)
· Modulación por división ortogonal de frecuencia (OFDM), también conocida como 'Modulación por multitono discreto' (DMT)
· Modulación por longitud de onda
· Modulación en anillo
Cuando la OFDM se usa en conjunción con técnicas de codificación de canal, se denomina Modulación por división ortogonal de frecuencia codificada (COFDM).
También se emplean técnicas de modulación por impulsos, pudiendo citar entre ellas:
· Modulación por impulsos codificados (PCM)
· Modulación por anchura de impulsos (PWM)
· Modulación por amplitud de impulsos (PAM)
· Modulación por posición de impulsos (PPM)
Cuando la seńal moduladora es una indicación simple on-off a baja velocidad, como una transmisión en código Morse o radioteletipo (RTTY), la modulación se denomina manipulación, modulación por desplazamiento, así tenemos:
· Modulación por desplazamiento de amplitud (ASK)
· Modulación por desplazamiento de frecuencia (FSK)
· Modulación por desplazamiento de fase (PSK)
· Modulación por desplazamiento de amplitud y fase (APSK o APK)
La transmisión de radioteletipo (RTTY) puede ser considerada como una forma simple de Modulación por impulsos codificados
Cuando se usa el código Morse para conmutar on-off la onda portadora, no se usa el término 'manipulación de amplitud', sino operación en onda contínua (CW).
La modulación se usa frecuentemente en conjunción con varios métodos de acceso de canal.
Obtenido de
TIPOS DE MULTIPLEXIÓN
Como dijimos anteriormente, múltiplex es la transmisión simultánea de varios canales de información separados en el mismo circuito de comunicación sin interferirse entre sí. Para la comunicación de voz, esto significa dos o más canales de voz en una sola portadora. Para los sistemas telefónicos significa muchos canales en un sólo par de cables o en una sola línea de transmisión coaxial. La transmisión simultánea puede llevarse a cabo por división de tiempo o por división de frecuencia.
MULTIPLEXIÓN POR DIVISION DE TIEMPO
La multiplexión por división de tiempo (MDT) es un medio de transmitir dos o más canales de información en el mismo circuito de comunicación utilizando la técnica de tiempo compartido. Se adapta bien a las seńales binarias que consisten en impulsos que representan un dígito binario 1 o 0. Estos impulsos pueden ser de muy corta duración y sin embargo, son capaces de transportar la información deseada; por tanto, muchos de ellos pueden comprimirse en el tiempo disponible de un canal digital. La seńal original puede ser una onda analógica que se convierte en forma binaria para su transmisión, como las seńales de voz de una red telefónica, o puede estar ya en forma digital, como los de un equipo de datos o un ordenador.
La multiplexión por división de tiempo es un sistema sincronizado que normalmente implica una MIC. En la Figura puede verse un diagrama simplificado del sistema MDT con tres canales de información simultáneos. Las seńales analógicas se muestrean y la MAI los transforma en impulsos, y después la MIC codifica los muestreos. Después los muestreos se transmiten en serie en el mismo canal de comunicación, uno cada vez. En el receptor, el proceso de desmodulación se sincroniza de manera que cada muestreo de cada canal se dirige a su canal adecuado. Este proceso de denomina múltiplex o transmisión simultánea, porque se utiliza el mismo sistema de transmisión para más de un canal de información, y se llama MDT porque los canales de información comparten el tiempo disponible.
La parte de preparación de la seńal y modulación del sistema se denomina multiplexor (MUX), y la parte de desmodulación se llama desmultiplexor (DE-MUX). En el MUX, como se ve en la Figura, un conmutador sincronizado (interruptor electromecánico) conecta secuencialmente un impulso de sincronización, seguido por cada canal de información, con la salida. La combinación de este grupo de impulsos se denomina cuadro, que vemos en la Figura 1.14B. El impulso de sincronización se utiliza para mantener la transmisor y la receptor sincronizados, es decir, para mantener en fase el sincronizador del receptor con el del transmisor. En el DEMUX, que puede verse en la Figura, un desconmutador dirige impulsos de sincronización hacia el sincronizador del receptor, y el muestreo de información envía los impulsos hasta sus canales correctos para su posterior análisis.
Una ventaja de la MDT es que puede utilizarse cualquier tipo de modulación por impulsos. Muchas compańías telefónicas emplean este método en sus sistemas MIC/MDT.
MULTIPLEXIÓN POR DIVISION DE FRECUENCIA
Al igual que la MDT, la multiplexión por división de frecuencia (MDF) se utiliza para transmitir varios canales de información simultáneamente en el mismo canal de comunicación. Sin embargo, a diferencia de la MDT, la MDF no utiliza modulación por impulsos. En MDF, el espectro de frecuencias representado por el ancho de banda disponible de un canal se divide en porciones de ancho de banda más pequeńos, para cada una de las diversas fuentes de seńales asignadas a cada porción. Explicado de forma sencilla, la diferencia entre los dos sistemas es ésta: En MDF, cada canal ocupa continuamente una pequeńa fracción del espectro de frecuencias transmitido; en MDT, cada canal ocupa todo el espectro de frecuencias durante sólo una fracción de tiempo.
En la Figura se muestra cómo funciona un sistema MDF. En el transmisor (Figura), las frecuencias de cada canal se cambian por medio de moduladores y filtros equilibrados. Entonces las salidas de los filtros se alimentan a un MUX, donde se sitúan una junto a otra en un canal de banda ancha para su transmisión en grupo. En el receptor (Figura 1.15B), un DEMUX cambia los canales a sus frecuencias originales mediante filtrado. A continuación, las seńales filtradas pasan a un modulador equilibrado y después a un filtro PB para su posterior recuperación.
Multiplexado estadístico o asíncrono.
Es un caso particular de la multiplexación por división en el tiempo. Consiste en no asignar espacios de tiempo fijos a los canales a transmitir, sino que los tiempos dependen del tráfico existente por los canales en cada momento.
Sus características son:
· Tramos de longitud variables.
· Muestreo de líneas en función de su actividad.
· Intercala caracteres en los espacios vacíos.
· Fuerte sincronización.
· Control inteligente de la transmisión.
Los multiplexores estáticos asignan tiempos diferentes a cada uno de los canales siempre en función del tráfico que circula por cada uno de estos canales, pudiendo aprovechar al máximo posible el canal de comunicación.
REGRESAR A LA PAGINA PRINCIPAL  |